
Выбор правильного уровня пульсаций тока дросселя
Frederik Dostal, Радиолоцман №3-4, ст.24
Введение
Импульсный регулятор преобразует входное напряжение в более высокое или низкое выходное напряжение. Для временного хранения энергии в нем используется дроссель. Размеры этого дросселя зависят от частоты переключения импульсного регулятора, а также от ожидаемого тока, протекающего через схему. Как именно выбирается правильное значение индуктивности? Это можно сделать с помощью общепринятой формулы, содержащей значение пульсаций тока дросселя. В технических описаниях большинства импульсных регуляторов, а также в большинстве указаний по применению и других пояснительных текстов в качестве значений, рекомендованных при работе с номинальной нагрузкой, указываются пульсации тока дросселя в 30%. Это означает, что при номинальном токе нагрузки пики тока дросселя на 15% выше, а провалы тока дросселя на 15% ниже среднего тока. Почему пульсации тока дросселя, или коэффициент пульсации тока (CR) 30% обычно выбирается в качестве хорошего компромисса?
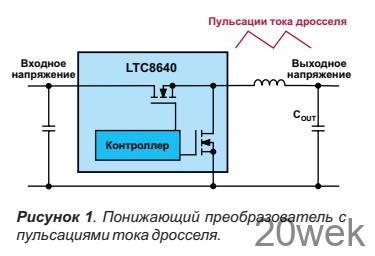
Для понижающего преобразователя, подобного показанному на Рисунке 1, применима формула (1):

Эта формула позволяет рассчитать требуемую величину индуктивности L для понижающего преобразователя на основе коэффициента пульсаций тока CR. Это соотношение обычно указывается как 0.3 или 30% от размаха пульсаций. Здесь D — коэффициент заполнения, а T — длительность периода, которая зависит от соответствующей частоты переключения.
Что происходит при различных пульсациях тока дросселя?
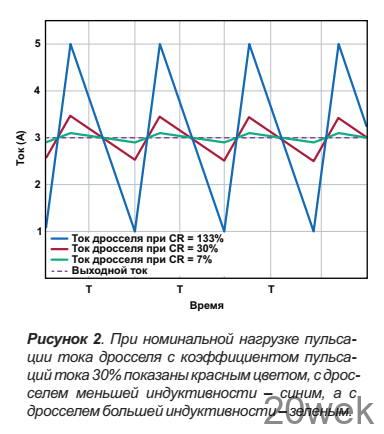
На Рисунке 2 красным цветом показаны пульсации тока дросселя (коэффициент пульсаций тока CR) 30% в схеме с выходным током 3 А. Это компромисс, который обычно выбирается при разработке схем импульсных регуляторов. Кривая, показанная синим цветом, соответствует пульсациям тока дросселя 133%, а зеленый цвет соответствует пульсациям 7%.
На Рисунке 3 показано, что происходит, когда та же схема работает с частью номинальной нагрузки, например, с выходным током 1 А. При больших пульсациях тока дросселя, показанных синей линией на Рисунке 3, энергия в дросселе полностью разряжается в каждом цикле преобразования. Этот режим называется режимом прерывистой проводимости (discontinuous conduction mode, DCM). В этом режиме изменяются условия обеспечения устойчивости контура управления и могут увеличиться пульсации выходного напряжения.
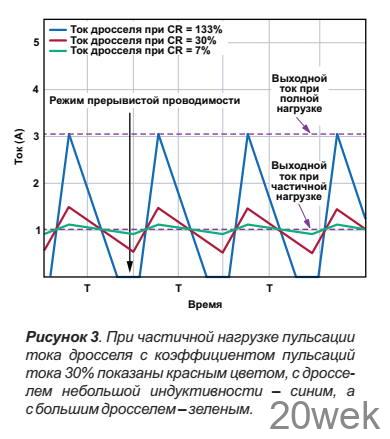
Чтобы избежать DCM, необходим определенный коэффициент пульсаций тока. При коэффициенте пульсаций тока 30% достигается хороший компромисс. Если коэффициент пульсаций тока небольшой, даже при частичных нагрузках, система в основном работает в режиме непрерывной проводимости тока. Таким образом, схема может быть оптимизирована для работы в этом режиме.
Что будет, если выбранный коэффициент пульсаций тока слишком велик? При больших коэффициентах пульсаций тока, превышающих 30%, размеры дросселя меньше и, следовательно, он дешевле. К сожалению, пиковые токи при этом резко возрастают и создают больше электромагнитных помех, чем это обычно допустимо в типичных схемах. Кроме того, режим непрерывной проводимости (continuous conduction mode, CCM) может быть достигнут только при более высоких токах нагрузки. Это не должно быть проблемой, но характеристики схемы в этом режиме меняются, что должно учитываться при ее проектировании.
Возникающие при этом пульсации выходного напряжения больше, чем при более низких пульсациях тока дросселя.
Что будет, если выбранный коэффициент пульсаций тока слишком мал?
При низких коэффициентах пульсаций тока менее 30% дроссель имеет большие размеры и, соответственно, стоит дорого. Реакция схемы на изменения нагрузки также замедляется из-за больших размеров накопителя энергии. Если большой ток нагрузки быстро обрывается, энергия, запасенная в дросселе, должна куда-то деваться. Это увеличивает напряжение на выходном конденсаторе COUT. Чем больше энергии в дросселе, тем больше повысится выходное напряжение. Это избыточное напряжение может повредить питаемую схему. Если взвесить преимущества и недостатки различных коэффициентов пульсаций тока дросселя, то значения около 30% представляются хорошим компромиссом для большинства приложений. Однако в некоторых случаях допустимы отклонения, пока конечные результаты остаются приемлемыми.
