
Многооборотный TPO датчик положения потребляет нулевую мощность
Радиолоцман №3-4/2024, ст.34
Аннотация
В этой статье описываются существующие методы, используемые для реализации возможностей многооборотных измерений с функцией TPO, и представлено новое упрощенное решение, которое призвано изменить как промышленный, так и автомобильный рынки датчиков положения. Упрощенная система позволит разработчикам, независимо от наличия опыта проектирования магнитных систем, заменить дорогие и громоздкие существующие решения.
Введение
Датчики положения и энкодеры повсеместно используются в автомобильной и промышленной технике, где жизненно важно иметь постоянную информацию о положении системы. Однако существующие датчики положения и энкодеры с поддержкой TPO могут предоставлять данные о положении только заодин поворот или за 360°. Системы, которым требуется TPO информация о положении в течение нескольких оборотов или в более широком диапазоне измерений, обычно содержат резервный источник питания для отслеживания и запоминания нескольких оборотов однооборотного датчика после неожиданного отключения питания или для отслеживания нескольких поворотов при выключенном зажигании или отключенном питании. В качестве альтернативы в систему может быть добавлен понижающий редуктор для уменьшения количества оборотов до одного, чтобы в сочетании с датчиком одного оборота получать TPO информацию о нескольких поворотах. Эти решения дороги и громоздки, а в случае аккумуляторной системы резервного питания требуется договор на регулярное техническое обслуживание.
Датчики углового и линейного положения являются ключевыми устройствами, используемыми в приложениях, где разработчику системы необходимо обеспечить постоянное определение положения механической системы для контура регулирования, даже после потери питания, произошедшего как в рамках нормального рабочего режима, так и случайно. Задача разработчиков систем состоит в том, чтобы обеспечить TPO доступность информации о положении даже после потери питания. Если состояние системы потеряно, то для ее возврата в известное состояние требуется длительная и зачастую сложная процедура.
Существующие решения
Современные фабрики все больше зависят от роботов и коботов, которые сокращают время производственных циклов, увеличивают производительность и повышают эффективность. Одним из основных факторов, связанным со стандартными роботами, коботами и другим автоматизированным сборочным оборудованием, который увеличивает затраты и снижает эффективность, является время простоя, необходимое для возврата в исходное состояние и инициализации после внезапного отключения питания во время работы. Хотя эту проблему можно решить с помощью резервных аккумуляторов, памяти и однооборотных датчиков, эти решения имеют свои ограничения. Аккумуляторные батареи имеют ограниченный срок службы, и для замены батарей необходимы контракты на техническое обслуживание. В некоторых условиях, где существует опасность взрыва, максимальное количество энергии, которое может быть запасено в аккумуляторной батарее, ограничивается. Уменьшение объема накопленной энергии приводит к сокращению цикла технического обслуживания, при котором батареи необходимо заменять чаще.
Альтернативой резервному аккумулятору является использование модулей сбора энергии на основе проволоки Виганда. В этих модулях используется специально обработанный провод, магнитная коэрцитивность внешней оболочки которого намного выше коэрцитив- ности внутреннего сердечника. Различие коэрцитивных сил создает всплески напряжения на выходе устройства при вращении магнитного поля. Всплески можно использовать для питания внешней схемы и записи количества оборотов в сегнетоэлектрическую память с произвольным доступом (FRAM).
Магнитная многооборотная память, разработанная компанией Analog Devices, не нуждается во внешнем питании для записи количества оборотов внешнего магнитного поля. Это позволяет уменьшить размеры и стоимость системы.
Технология многооборотных датчиков
В основе многооборотного магнитного датчика лежит спираль из материала с гигантским магнитосопротивлением (GMR), состоящая из множества нанопроволочных элементов GMR. Принцип работы датчика основан на анизотропии формы и генерации доменных стенок в генераторе доменных границ в присутствии внешнего магнитного поля. При вращении внешнего магнитного поля доменные стенки распространяются по узким спиральным дорожкам (нанопроволокам), прикрепленным к генератору доменных стенок, как показано на Рисунке 1.

По мере движения доменных стенок через структуры дорожек спирали состояние каждого элемента дорожки меняется. Поскольку состояние каждого из них можно определить, измерив их сопротивление. Датчик работает только от внешнего магнитного поля, поэтому для подсчета оборотов не требуется дополнительное резервное питание или технологии сбора энергии. При повторной подаче питания на датчик становится доступным считывание состояния счетчика оборотов без каких-либо дополнительных действий пользователя или сброса системы.
Комбинированное технологическое решение, упрощающее проектирование системы
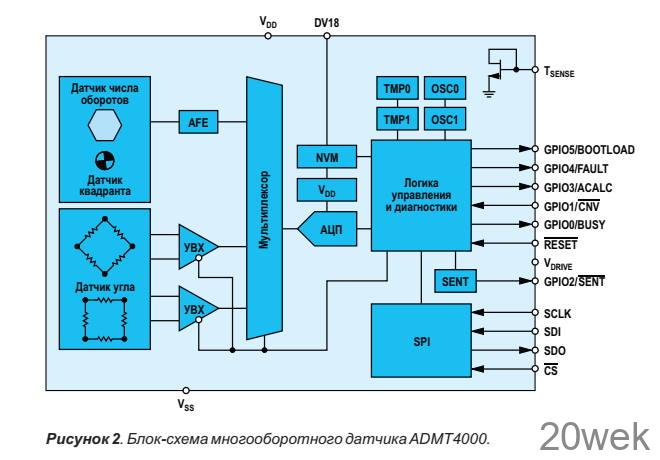
Общая блок-схема ADMT4000, показанная на Рисунке 2, объединяет описанный ранее многооборотный GMR датчик с высокоточным датчиком угла и интегрированной микросхемой обработки сигнала, образуя решение, способное регистрировать 46 оборотов или 16,560° углового движения с типовой точностью ±0.25°. Встроенная микросхема обработки сигналов позволяет дополнительно усовершенствовать систему для поддержки гармонической калибровки, способной устранить ошибки, связанные с магнитными и механическими допусками в приложении. ADMT4000 обеспечивает на выходе цифровое представление 46 оборотов (угла от 0° до 16,560°) через интерфейсы SPI или SENT. ADMT4000 устанавливают напротив дипольного магнита, расположенного на вращающемся валу, как показано на Рисунке 3.

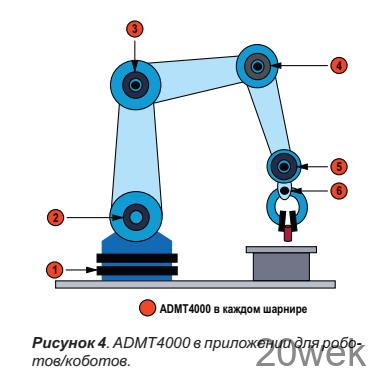
Возможности ADMT4000 принесут пользу многим промышленным приложениям, включая отслеживание положения суставов манипуляторов роботов и коботов в случае отключения электричества или при выключении питания (см. Рисунок 4).
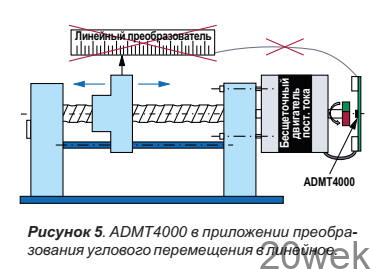
Другие промышленные приложения включают абсолютное и TPO отслеживание X-Y координат в устройствах промышленной автоматизации, станках или медицинском оборудовании (показано на Рисунке 5).
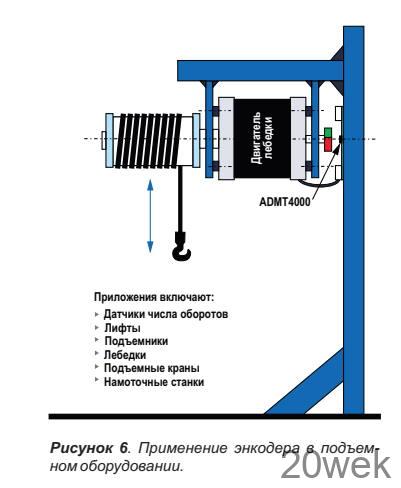
Другие варианты использования в приложениях с преобразованием углового перемещения в линейное включают подсчет оборотов катушек, барабанов, шпуль, бобин, подъемников, лебедок и подъемных устройств (Рисунок 6) при включении питания или отслеживание движения при отключении питания или во время перебоев в подаче электроэнергии.
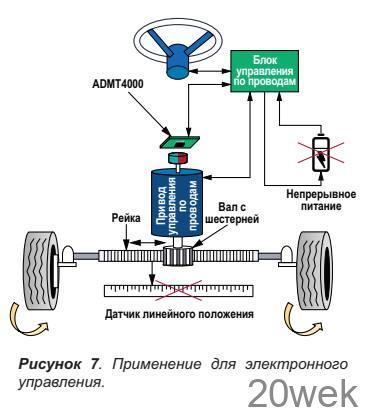
Кроме того, TPO определение положения, обеспечиваемое микросхемой ADMT4000, имеет большое значение для автомобильных приложений, включая, помимо прочего, приводы трансмиссии (Рисунок 5), электроусилители руля, включая рулевое управление по проводам (Рисунок 7), механизмы блокировки трансмиссии на стоянках, другие приводы общего назначения и втягивающие устройства ремней безопасности (Рисунок 8).

Размеры, стоимость и диапазон рабочих температур микросхемы ADMT4000 позволяют использовать ее в широком спектре приложений, включая критически важные для безопасности приложения в автомобильной и промышленной отрасли.
Заключение
ADMT4000 и первый интегральный многооборотный TPO датчик положения позволяют значительно снизить сложность и трудоемкость проектирования систем, что в конечном итоге приведет к созданию более компактных, легких и недорогих решений. Простота использования ADMT4000 дает разработчикам с опытом магнитного проектирования и без него возможность добавить новые и улучшенные функции в существующие приложения и открыть двери для многих новых приложений
TPO (True Power-On) — способность датчика предоставлять информацию о положении сразу после включения питания без использования резервного питания.
